Mapping
More information and examples on mapping
The official rules can be found on the official RoboCupJunior homepage.
Corrections and clarifications can be found on the official RoboCupJunior Forum
We summarise some of the key rules below as a quick summary.
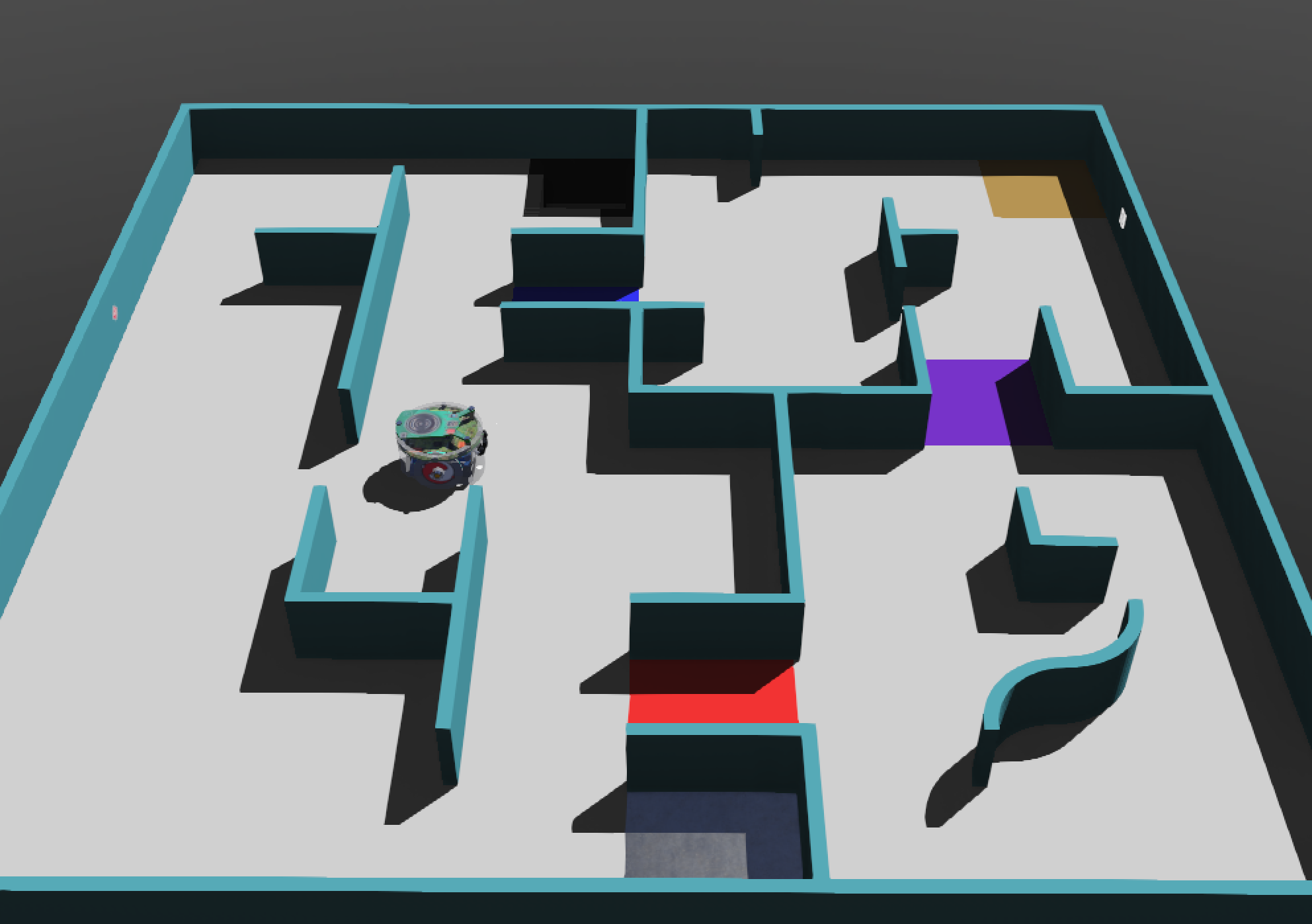
In the simulation challenge on the Erebus platform, there are three main missions.
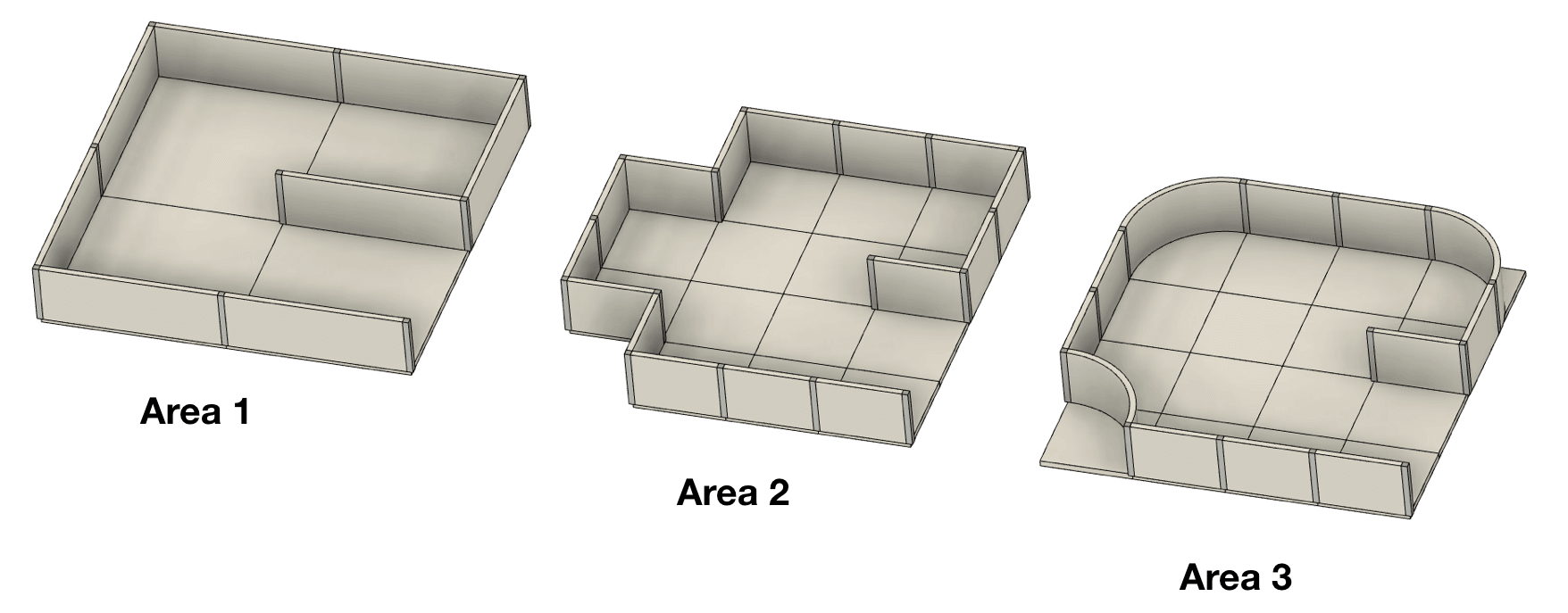
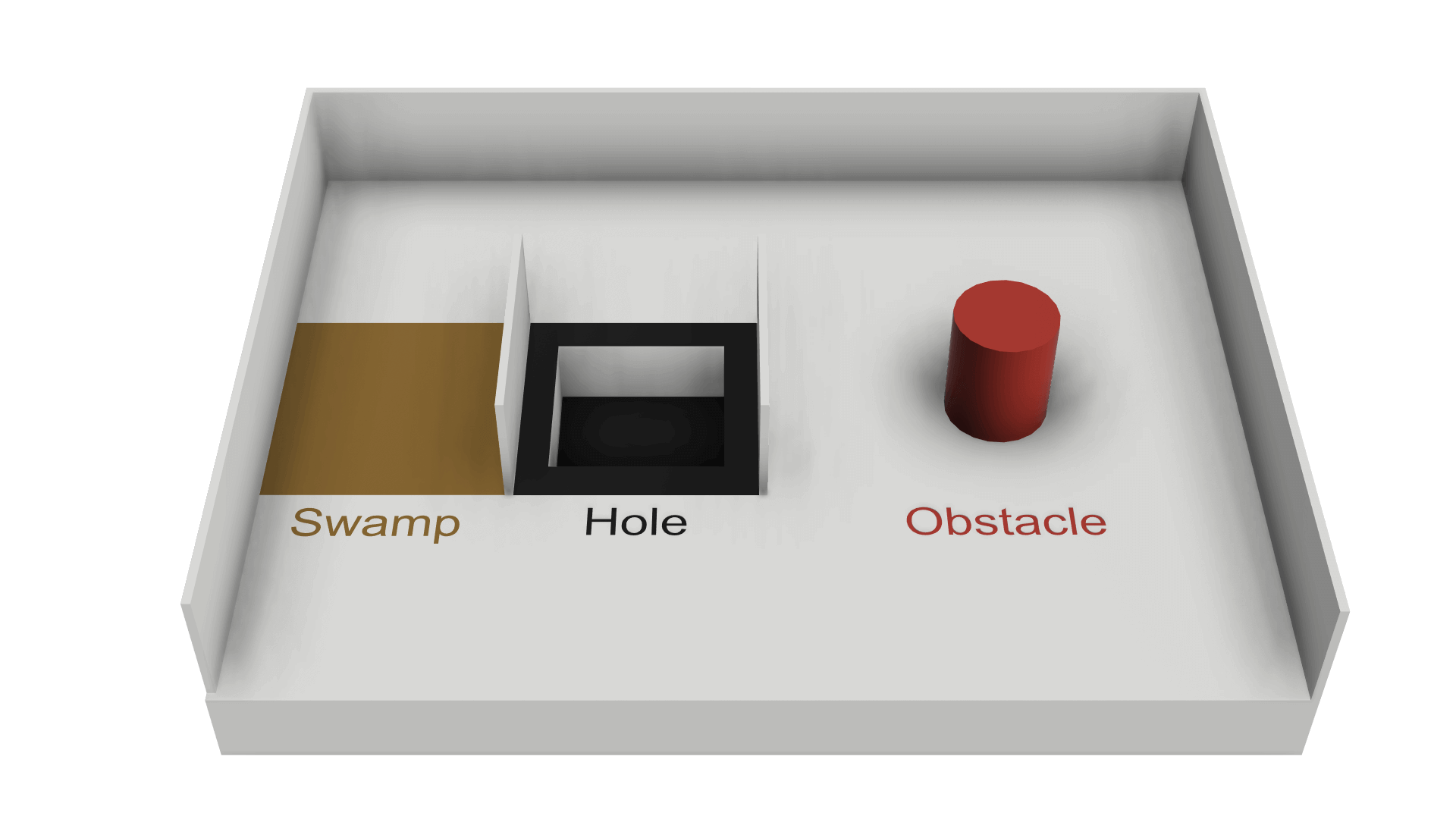
The basic environemnt is comprised of tiles and walls. The smallest division used is the quarter-tile.
Victims are comprised of letters H, S, and U.

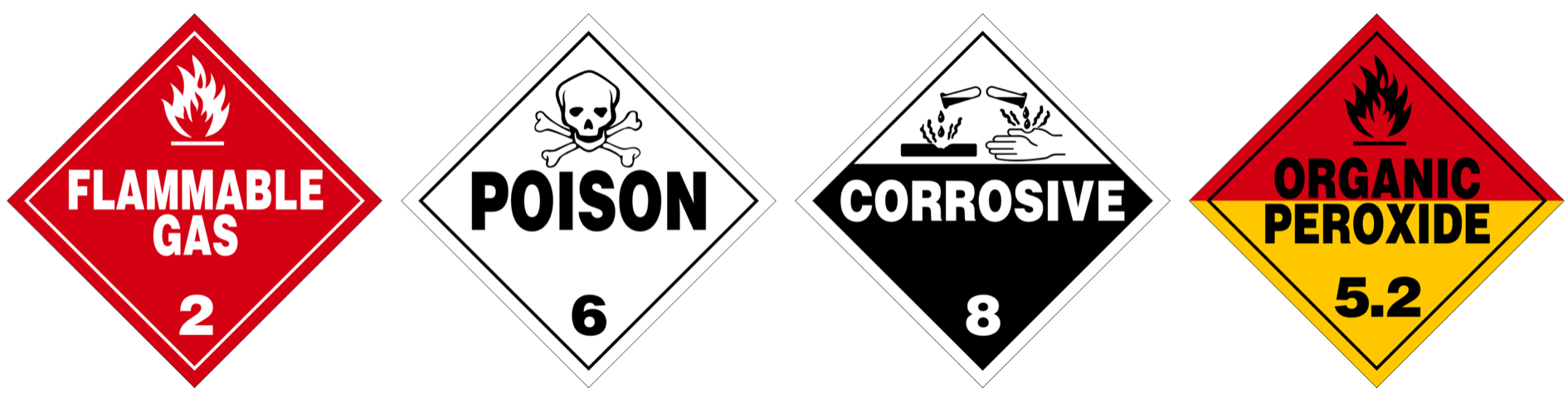
Hazmat Signs are lebles given to hazardous materials and equipment (used in real life). The four labels shown above are used in the Erebus environment.
To identify a victim or hazard map, the robot must stop for 1 seconds, and send the location and victim type to the game manager The robot must be close (1/2 tile away) from the victim/hazard map.
When a lack of progress(LoP) happens or is called, the robot will restart from the most recent visited check point tiles (marked by a silver colour). A LoP happens when,
Mapping is scored as a multiplier to the overall scores obtained during the run. To obtain a mapping multiplier, the robot must submit a matrix to the game’s main supervisor at the end of the game. Here, the submitted matrix is compared against the “answer key” to produce a correctness score.
For more detailed mapping instructions, see here.
If the robot is able to return to the start tile before the end of the game, an extra 10% increase is given to your score.
More information and examples on mapping
Was this page helpful?
Glad to hear it! Please tell us how we can improve.
Sorry to hear that. Please tell us how we can improve.